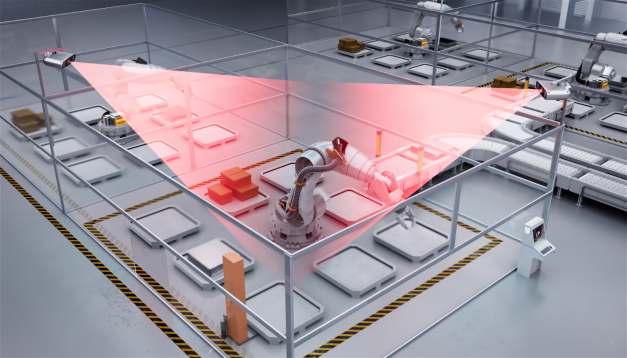
区域尺寸、风险动作和遮挡点
需要确认相机安装位置、机械臂动作范围、人员通道、围栏结构和现场光照。
需要确认相机安装位置、机械臂动作范围、人员通道、围栏结构和现场光照。
用于区域状态提醒、异常提示、状态记录和现场声光报警,不作为独立安全功能使用。
需确认现场联动逻辑、复位方式、报警等级、操作习惯和既有安全装置边界。
配置依据
区域状态检测通常根据危险区域、人员通行、遮挡补盲和现场联动逻辑确定配置。
主要能力
机械臂工位需确认围栏尺寸、出入口位置、遮挡、相机安装高度和 PLC 信号。
对围栏工位和机械臂作业区内的人体进入、靠近和停留状态进行辅助检测。
在机械臂停机或准备启动前,对区域内是否仍有人员停留进行复核,作为现场启动确认的辅助信号。
利用立体视觉与空间距离信息区分区域内目标和区域外经过目标,降低常规视觉方案的干扰。
与 PLC、声光告警和现场控制系统联动,使检测结果进入提示、复核和报警流程;停机、复位和放行以现场安全方案为准。
边界说明
区域状态检测用于现场复核和报警联动,不能替代围栏、安全门、光栅、急停等安全装置。
围栏、安全门、挂牌锁等手段用于限制非授权进入与维护管理,安全功能以现场安全回路为准。
通过光栅和入口检测装置覆盖人员进入瞬间,解决出入口通行的快速响应需求。
对作业区内部进行持续空间感知,辅助识别围栏内实时状态和误报过滤。
将区域内有人/无人状态输出给 PLC、启动复核和报警流程,具体联动以现场安全方案为准。
围栏角点高位布置双机互补覆盖,形成更完整的区域感知范围。
当机械臂本体、货物或码垛造成遮挡时,需要通过增加设备和重新规划视角进行补盲。
面对大围栏或多工位空间,可按区域分割思路部署多台设备,保持视野覆盖连续性。
视野覆盖、近端盲区和围栏外干扰通常需要通过安装高度、俯角与水平角配合调节。
系统构成
区域状态检测系统由双目成像、区域规则、空间测距、算法判断和 PLC 信号对接组成。 项目前期完成现场勘测和盲区确认。
空间检测、区域规则和 PLC 输出
利用双目成像获取区域内目标的空间信息,为人员存在与距离判断提供基础。
基于区域规则、空间距离和目标识别逻辑形成进入、停留和复核等关键状态判断。
与 PLC、声光告警和设备启停逻辑配合,检测结果可进入机械臂作业流程。
项目特点
实施时关注人员识别、误报抑制、安装布点和 PLC 信号对接方式。
在围栏和入口检测之外,补充作业区内部人员状态检测。
通过立体视觉减少围栏外人员经过、背景变化等干扰。
把停机、复位和启动前无人确认接入现场控制逻辑。
根据围栏尺寸、遮挡和大面积工位进行勘测与布点规划,确认检测区域和补盲位置。
典型应用场景
应用场景
检测效果取决于场景类型、围栏结构、遮挡状况和联动逻辑。

用于标准围栏机械臂工位,对区域进入、停留和启动前复核进行状态检测。

当机械臂、货物或工装本体产生遮挡时,需要通过补盲与分区布点提升区域感知完整性。

在大范围空间中按区域分割与多设备配合部署,提升视野覆盖连续性与现场可用性。