抓取节拍
10 s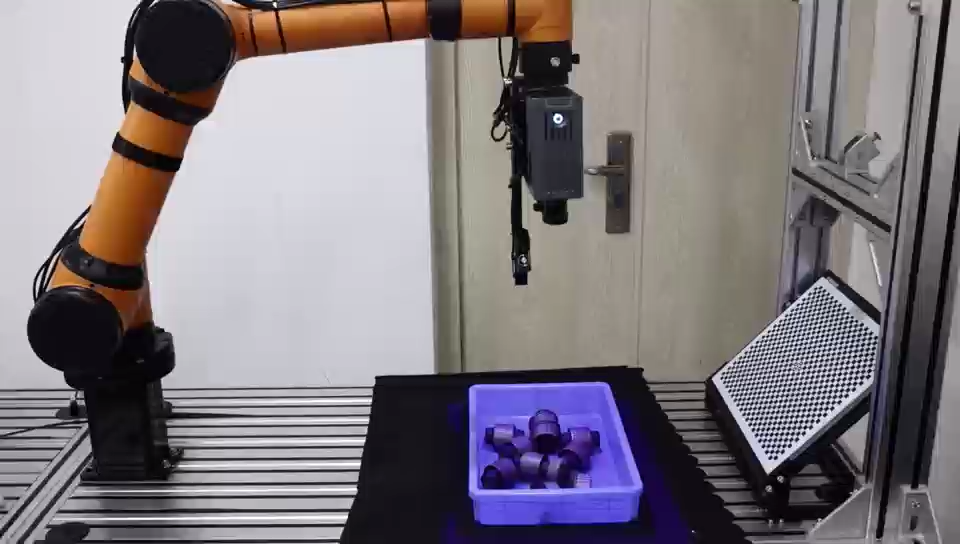
定位精度
0.1 mm兼容范围
多尺寸工件输出结果
姿态坐标所属行业
自动化装配 / 多品种上料
主要任务
无序来料定位、姿态识别、抓取引导
项目特点
面向散乱来料的稳定抓取
项目背景
现场来料以散乱状态进入工位,机器人需要依赖视觉系统快速判断目标位置和姿态,再完成抓取与转运。
现场挑战
- 目标姿态变化明显,不能使用固定抓取点。
- 抓取前必须先完成稳定定位,否则容易造成空抓或夹持偏差。
- 同一工位往往还要兼顾多种尺寸和批次变化。
方案设计
方案设计
方案重点为姿态识别、抓取点生成和机器人联动三部分,无序来料可进入稳定节拍。
姿态识别与目标筛选
- 对散乱放置的目标进行位置与姿态识别。
- 筛选适合当前抓取动作的目标,降低连续失败概率。
- 在批次变化时保持统一输出逻辑。
抓取点生成与机器人联动
- 根据目标姿态自动生成抓取坐标与角度。
- 将结果实时发送给机器人执行单元。
- 抓取动作与下游工序节拍保持同步。
无序抓取类项目更强调执行稳定性,视觉系统的任务是把随机状态变成可执行动作。
现场画面
现场画面
现场画面包括机器人、3D 相机和抓取工位的配合状态,可直接看到无序来料如何被转换成抓取动作。
使用效果
- 提升散乱来料场景下的抓取成功率。
- 降低人工摆盘和人工找位成本。
- 适配多品种上料和多品种自动化生产。
适用场景
适用于五金件、小型结构件、装配前散料和其他需要三维抓取引导的自动化工位。