工件尺寸、姿态范围和表面状态
需要确认视野、精度、反光、遮挡、来料姿态、抓取节拍和安装空间。

需要确认视野、精度、反光、遮挡、来料姿态、抓取节拍和安装空间。
可输出机器人抓取位姿、测量结果、三维模型文件或缺陷判定结果。
重点确认标定方式、坐标转换、通讯节拍、异常处理和现场复位流程。
配置依据
3D 视觉项目通常围绕点云质量、坐标标定、节拍和自动化接口确定配置。
主要能力
3D 视觉需确认工件材质、尺寸、反光情况、视野、精度和节拍,并确定相机安装方式和软件输出。
针对不同尺寸、材质和结构的工件完成 3D 数据采集,为分析和引导提供可靠基础。
围绕尺寸、轮廓、位置关系和表面起伏进行三维分析,服务于质量控制与工艺验证。
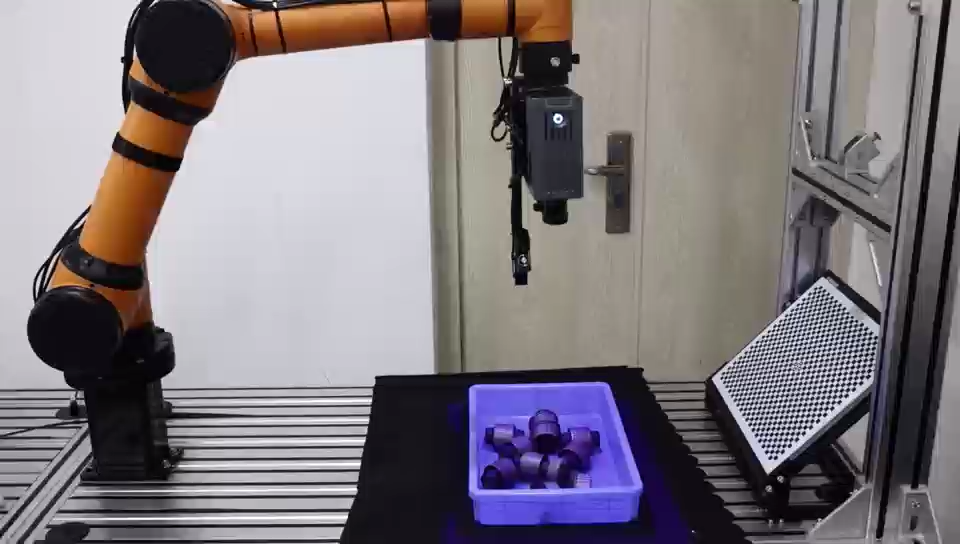
将三维感知结果转换为位置姿态和引导信息,帮助机器人完成抓取、上料和装配对位任务。
面向产品开发、工装优化和逆向设计,支持三维模型重建、CAD 关联与数据输出。
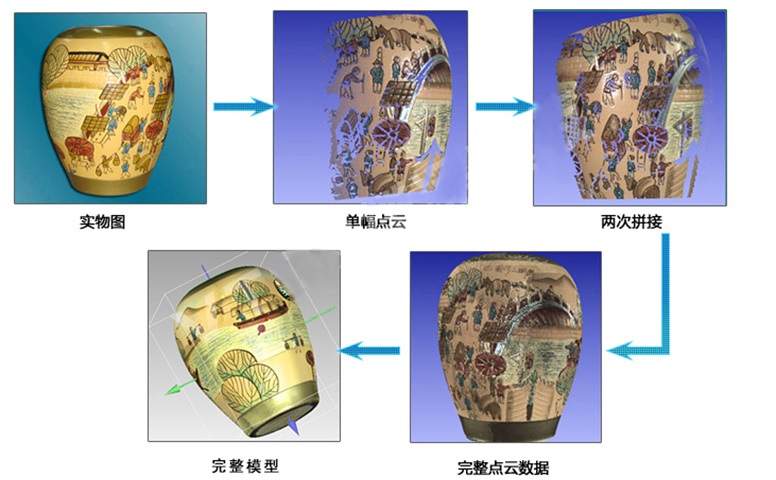
项目流程
3D 视觉重点在于点云稳定采集、测量结果输出和机器人坐标输出。
根据工件尺寸、结构和安装方式完成设备标定、视野规划与采集准备。
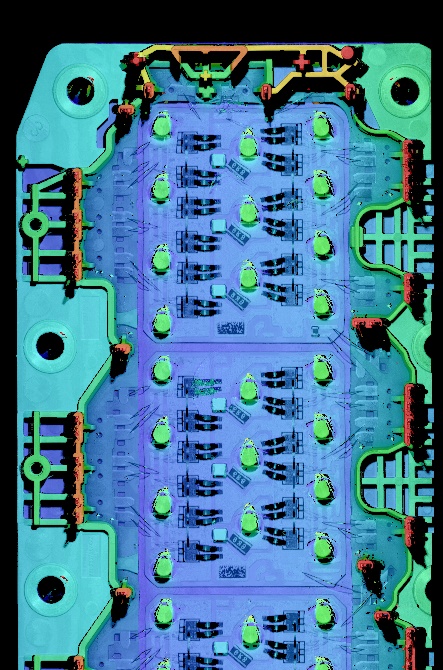
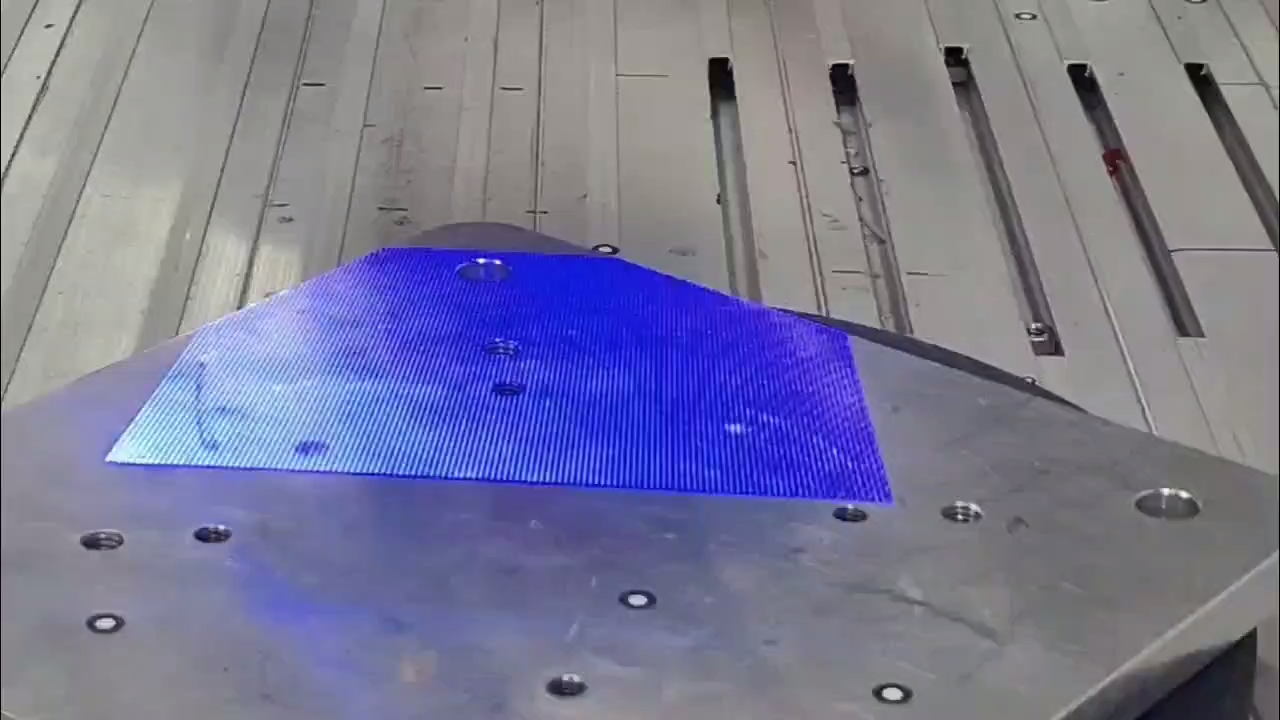
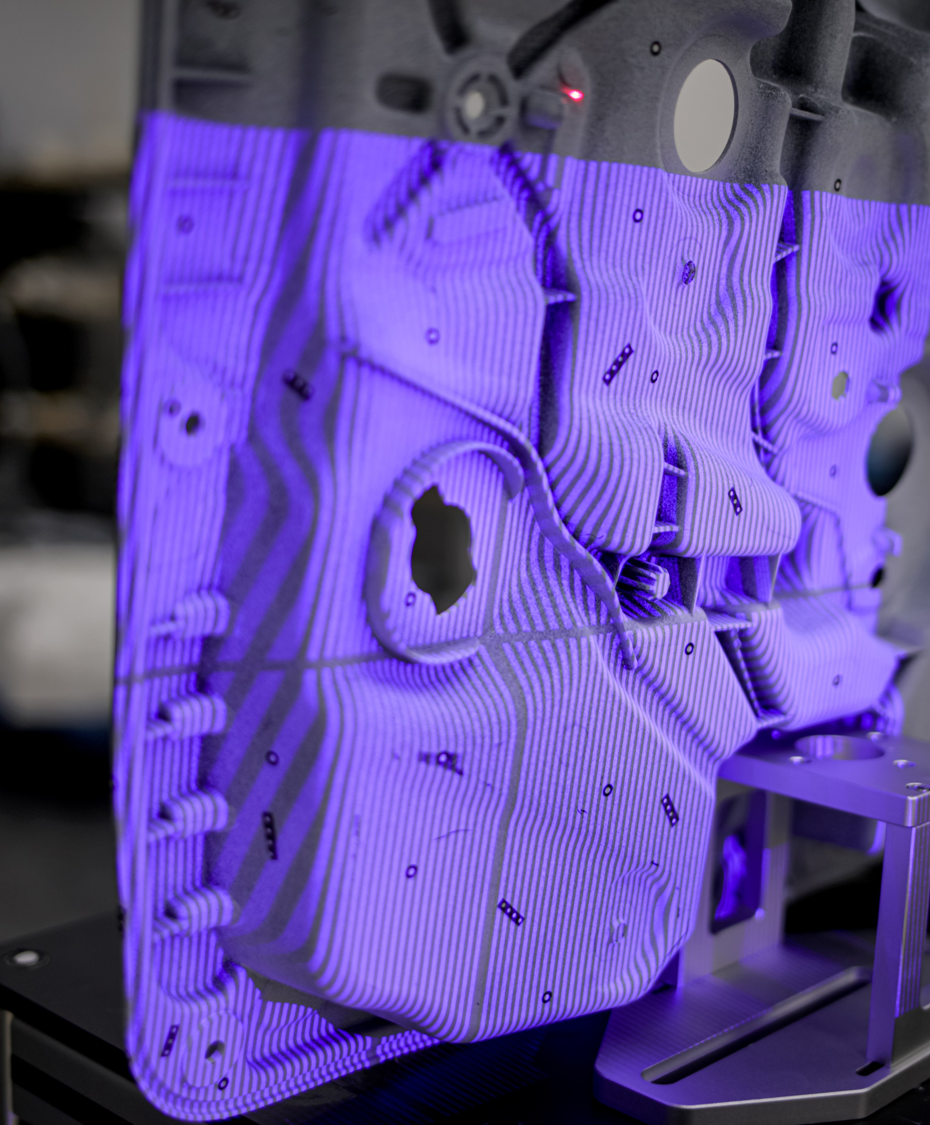
对工件进行三维采集,获取能反映几何结构和表面起伏的点云数据。
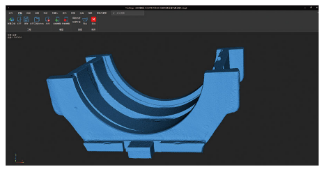
围绕多视角数据进行拼接、去噪、裁剪和特征处理,形成可用的三维结果。
输出测量结果、位姿信息或 CAD 关联数据,服务于检测、建模和自动化控制。
不同工件材质、颜色和表面反光程度会显著影响 3D 采集稳定性,需要针对性设置采集方案。
大视野与高精度通常需要平衡,需要按任务目标选择视野和精度,不能只看单项参数。
当 3D 系统和机器人或产线工位结合时,采集速度、处理速度和输出方式都要服务现场节拍。
标定、点云生成、数据处理和 SDK 接口需要在项目前期确认。
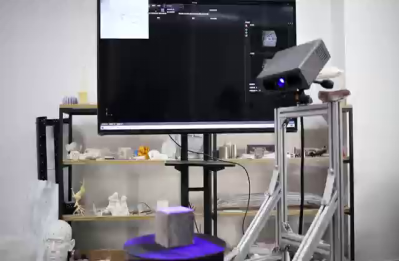
系统构成
一套 3D 视觉系统通常由相机、标定工装、采集机构、软件平台和自动化接口组成。 选型时要把视野、精度、节拍和安装空间放在一起看。
采集、处理、分析和结果输出
围绕视野、精度、安装方式和工作距离配置 3D 工业相机与辅助工装,建立稳定采集基础。
面向标定、点云生成、拼接处理、尺寸分析与模型输出建立统一的软件工作流程。
与机器人、转台、治具和业务软件系统联动,3D 数据用于检测与自动化作业。
项目特点
3D 视觉关注精度、速度、软件处理和现场接口匹配。
围绕不同尺寸工件和不同检测目标进行视野与精度匹配,避免只追求单项指标而忽略应用效果。
从标定、点云生成、拼接处理到结果输出形成完整软件流程,减少项目实施中的割裂感。
可与机器人、转台和工装治具配合,把坐标或测量结果输出给现场设备。
除现场检测外,也可用于逆向工程、产品建模和样件数字化归档。
案例与检测项目
项目案例
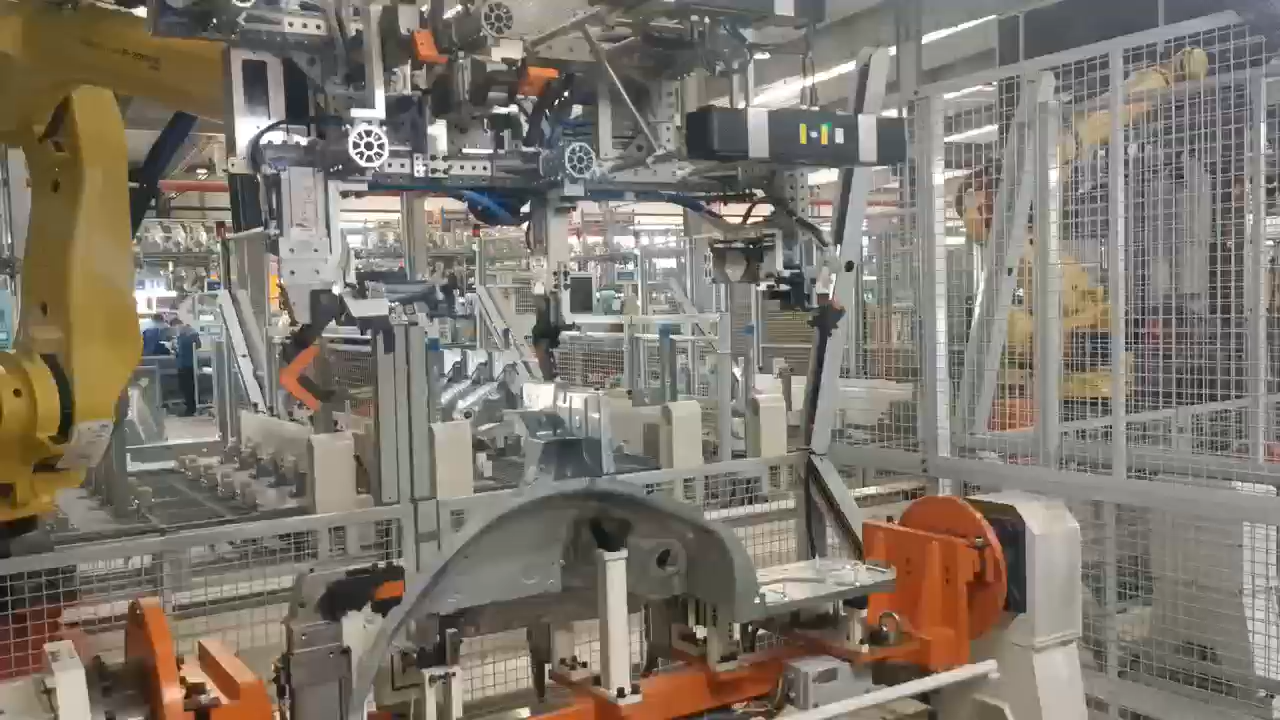
3D 视觉系统适用于结构复杂、姿态变化明显、需要空间坐标输出的自动化现场, 覆盖多工位定位、Pin 针测量、无序抓取、螺丝对孔、产品对位和彩色建模等任务。
项目案例
面向冲压自动化上料场景,使用 3D 拍照定位、模板匹配和机器人通讯, 完成 10 种 SKU 冲压件的识别、抓取与工装放置。